|
 Capítulo
I Capítulo
I
|
Controlador P.I.D. Opción
seleccionada.
El presente
capítulo
justifica la elección del elemento de control principal.
|
Controlador P.I.D.
Opción seleccionada:
LM629M-8
(SMD)
DS009219-21 con 24 contactos, de la casa "National semiconductors".
Justificación:
Para la
aplicación que le vamos a dar resulta suficiente y cumple
nuestras expectativas un modelo integrado que cumpla la norma del
sistema PID para control de motores. En concreto, hemos seleccionado el
modelo LM629 de la casa "National semiconductors", por las razones que
se exponen a continuación.
Existen
otros modelos, como el L6515 de la casa "SGS Thomson", con el sistema
que denominan "Twin Loop control", pero no resulta tan completo como el
seleccionado, y nos obligaría a utilizar su sistema de
realimentación, que requiere mayor circuitería,
siendo menos completo en su oferta. Su aportación es un
costo más bajo en el caso de que pensáramos en
una aplicación autónoma más simple, y
con menores exigencias de robustez y versatilidad.
Otros
modelos consultados nos remiten a aplicaciones completamente
integradas, para motores de más baja potencia de la que
requerimos.
El modelo
seleccionado, LM629, aporta el algoritmo de filtrado PID a partir de
los datos de posición-velocidad que le envía un
µC y la realimentación que devuelve un "encoder"
incremental situado sobre el rotor del motor. El LM629 recoge del
encoder información de posición y velocidad,
además de un impulso "índice", de uso opcional,
del que carece por ejemplo el L6515, y que tiene su utilidad en la
gestión de interrupciones por acumulación de
datos "indexados" de trayectoria efectuada.
Este
modelo en concreto (a diferencia del LM628 de la misma casa, que aporta
una salida digital de 8 bits para su conversión a
señal analógica de control) ofrece salida
modulada en ancho de pulso (PWM) para el control de la potencia,
adecuada para el control de una topología en puente completo
(full bridge) de MOSFET, en H, que es la etapa de potencia seleccionada
en nuestro trabajo. Se compone de una señal de magnitud de
corriente proporcional al ancho del pulso y otra de "signo" que
determina el sentido de giro.
Ofrece
además un "set" de comandos para el envío de los
coeficientes del PID y gestión de interrupciones de alto
nivel y sencilla programación.
El control
de operaciones (comandos) y transferencia de datos se
efectúa a través de un puerto paralelo de 8 bits,
que puede ser controlado por un µC situado sobre la misma
placa del sistema. Este a su vez puede operar de forma
autónoma, sobre secuencias dadas, previa
programación, o ser operado a través de puerto
serie UART (recepción-transmisión
asíncrona universal), con protocolo RS232, desde una CPU
remota.
(Por
razones de brevedad, no vamos a considerar, en principio, esta
última posibilidad, aunque queda abierta su
implementación como opción factible y no
excesivamente complicada, que podría aportar versatilidad al
sistema).
Vamos a
ver algunas de las características generales del LM629,
aunque en el siguiente apartado veremos en profundidad todos los
sistemas de que esta compuesto muestro MPID.

|
|
|
|
|
|
| |
Capítulo
III
|
Frecuencia del reloj
Frecuencia
del
reloj principal.
|
La
frecuencia
de reloj (CLK) ofrece dos
posibilidades: Hasta 6 o hasta 8 Mhz (fclk entre 1 y 8 Mhz).
En principio se selecciona la
más alta al no esperarse dificultad del µC, que
trabajará fácilmente con frecuencias de 20 MHz o
superiores, aunque queda a expensas de la influencia del reloj sobre la
frecuencia de trabajo del PWM para el puente H.
En cualquier caso, tratamos de una
aplicación donde puede ser crítica la velocidad
de respuesta en control y en atención a interrupciones.
En el código se denota con el
añadido de la cifra del reloj: LM629M-8.
|
|
|
Capítulo
IV
|
Alimentación
Alimentación
del dispositivo.
|
Alimentación.
Su alimentación es de 5v nominales (VDD entre 4.5 y 5.5
VDC), con salidas entradas (I/O) compatibles con tecnología
CMOS y HCMOS, y consumo máximo de 605 mW, y no resulta
crítica, fuera de las precauciones habituales.
Se alimentará, al igual que el resto de la
lógica, a través de un convertidor
monolítico, con entrada entre 16 y 40 voltios y salida fija
de 5 voltios, con potencia sobrada.
|
|
|
|
|
Capítulo
VI
|
Necesidades de Hardware
Necesidades a
considerar respecto del uso de componentes hardware.
|
Necesidades de "hardware".
Precisará el
diseño de la circuitería que haga de "interface"
con el µC, la inherente a la línea diferencial de
realimentación del "encoder" y la línea de
control de potencia del puente H, aislada mediante opto-acopladores de
la lógica.
Se va a considerar la posibilidad de
aprovechar manualmente la opción de "RESET" por "hardware",
si se llega a estimar útil. Se trataría de un
pulsador conectado directamente a la patilla RST para activar un
"reseteado" manual del LM629; pero está por definir si
resulta práctico o conveniente activar manualmente la
secuencia que supone el reset.
Sus principales
características son:
3
registros de 32 bits para la posición, la velocidad y la
aceleración.
Un filtro
digital PID programable.
Una
señal de salida PWM de 8 bits.
Un
generador interno de perfiles de velocidad trapezoidales.
La
velocidad , la posición y los parámetros del
filtro pueden ser cambiados durante el movimiento.
Distintos
modos de operación en cuanto a posición y a la
velocidad.
Interrupciones programables en tiempo real.
Capacidad
de gestión de señales increméntales en
cuadratura.
|
|
|
Capítulo
VII
|
Sistemas de control del MPID
Sistemas de
control
del MPID.
|
Sistemas de control del MPID.
El control de tipo proporcional -
integral - derivativo (P.I.D.), de naturaleza digital, basado en el
procesador de control de movimiento LM 629, es el que permite la
programación y tratamiento del movimiento del motor.
Los datos que precisa el PID se le hacen
llegar a través de línea de control paralelo,
mediante el cálculo de los tiempos ("timing") de la
lógica adecuada para un perfecto sincronismo.
Ésta lo comunica con un MICRO
CONTROLADOR (µC) donde se tiene acceso a programar
movimientos y velocidades y gestionar los eventuales problemas mediante
interrupciones, originadas por "software" cuando proceden de las
informaciones del PID, o por "hardware" si la procedencia es la etapa
de potencia que alimenta al motor.
Así mismo, tendrá
capacidad para almacenar información de los desplazamientos
realizados por el motor, para uso posterior. La programación
del µC será específica para cada
aplicación, aunque versátil y reprogramable.
El modelo escogido es un
microcontrolador 8051.
La etapa de potencia la forman 4 MOSFET
del tipo IRFP 250N montados en topología "H" (full bridge)
excitados por "drivers" específicos, del tipo IR2110, que
conducen la información para su disparo mediante
modulación por ancho de pulso (PWM), facilitada por el PID.
Esta arquitectura en "H" es la adecuada
para este tipo de control, dado que permite la regulación de
la potencia suministrada al motor y el sentido en que es aplicada a
éste.
Esta característica del
control de potencia permite que la alimentación para el
motor admita una amplia gama de modelos y potencias de motores, dado
que la modulación por ancho de pulso es capaz de conmutar
los MOSFET en forma que el motor sea excitado por la corriente media
adecuada en cada situación.
Las características
técnicas se apuntaran en el ANEXO A (hoja de
características del fabricante).
El ANEXO A, estará compuesto
por un Cd-Rom, donde estarán incluidos en formato PDF todos
los manuales de los distintos dispositivos a utilizar y una
relación de carpetas donde se encontraran los Esquemas del
circuito y sus correspondientes placas BOARD.
Un filtro
digital PID programable.
Una
señal de salida PWM de 8 bits.
Un
generador interno de perfiles de velocidad trapezoidales.
La
velocidad , la posición y los parámetros del
filtro pueden ser cambiados durante el movimiento.
Distintos
modos de operación en cuanto a posición y a la
velocidad.
Interrupciones programables en tiempo real.
Capacidad
de gestión de señales increméntales en
cuadratura.
|
|
|
|
|
Capítulo
IX
|
Modo de operación
Cómo
operará el sistema.
|
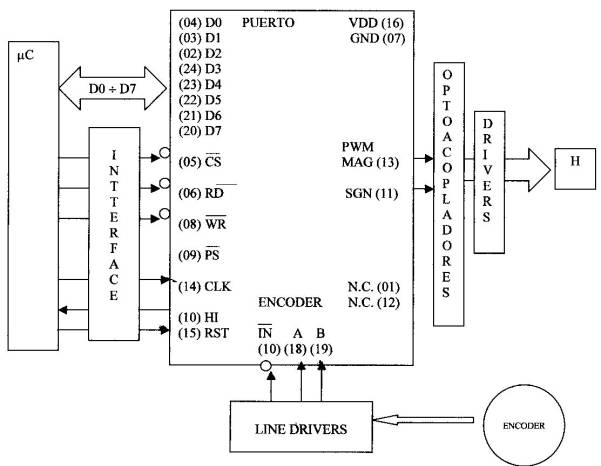
Modo de operación.
El diagrama de bloques típico
para construir un servo sistema usando un LM629 es el siguiente:
El procesador se comunica con el LM629 a
través de un puerto de entrada / salida para facilitar la
programación del perfil trapezoidal de velocidad y del
filtro PID.
Para iniciar el movimiento, el
procesador central carga los valores de aceleración,
velocidad y posición deseada en el generador de trayectorias
del LM629.
En cada período de muestreo
estos valores son usados para calcular la nueva posición
deseada, a la que se le resta la posición real del eje,
obtenida por el codificador óptico incremental y el
decodificador deposición. Así se origina la
señal de error, que es la entrada al filtro compensador PID.
El convertidor
digital-analógico convierte la señal producida a
otra aplicable al motor. De nuevo se decodifica la posición
y se genera otro perfil de velocidad.
Los cuatro bloques funcionales
más importantes del LM629 son:
a) El
generador de trayectorias.
b) La
realimentación en posición.
c) El
filtro digital PID.
d) La
salida PWM.
Después de hacer una breve
descripción del trabajo que tenemos que desarrollar, vamos a
entrar dentro de alguno de los dispositivos que vamos a utilizar,
apuntando una descripción mas detallada y profunda de cada
uno.
|
|
|

|
|
|